
Humanoid Robot — JSB Center for AI









Project information
- Category: University Project
- Date: August 2025 – Present
- Team: JSB Center for Artificial Intelligence, SDSU
- Role: Humanoid Robot Lead Engineer
Emotionally Expressive Humanoid Robot
As Lead Mechanical Engineer at SDSU's JSB Center for Artificial Intelligence, I'm heading development of a humanoid robot capable of emotionally expressive, day-to-day task execution using machine learning.
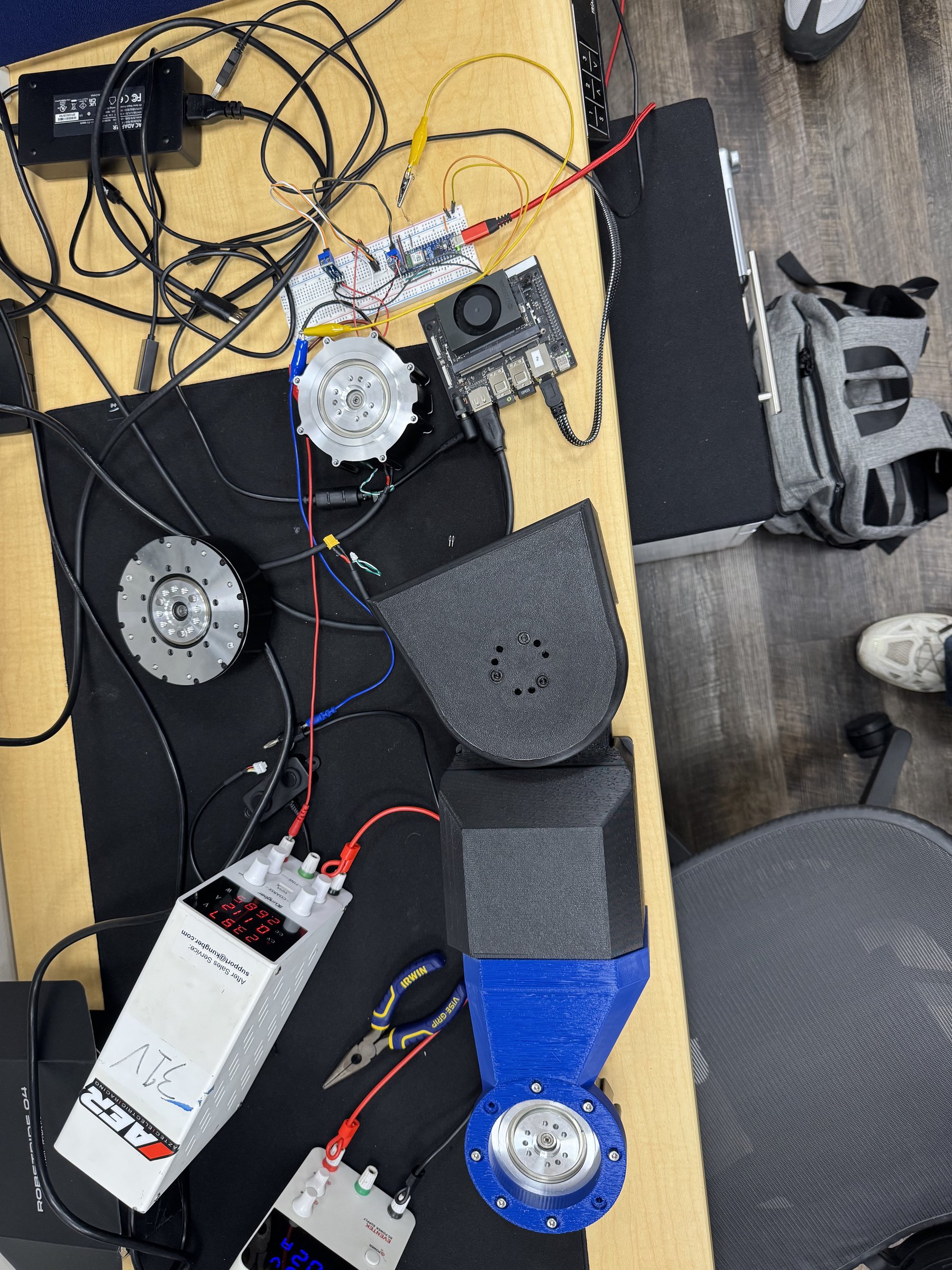
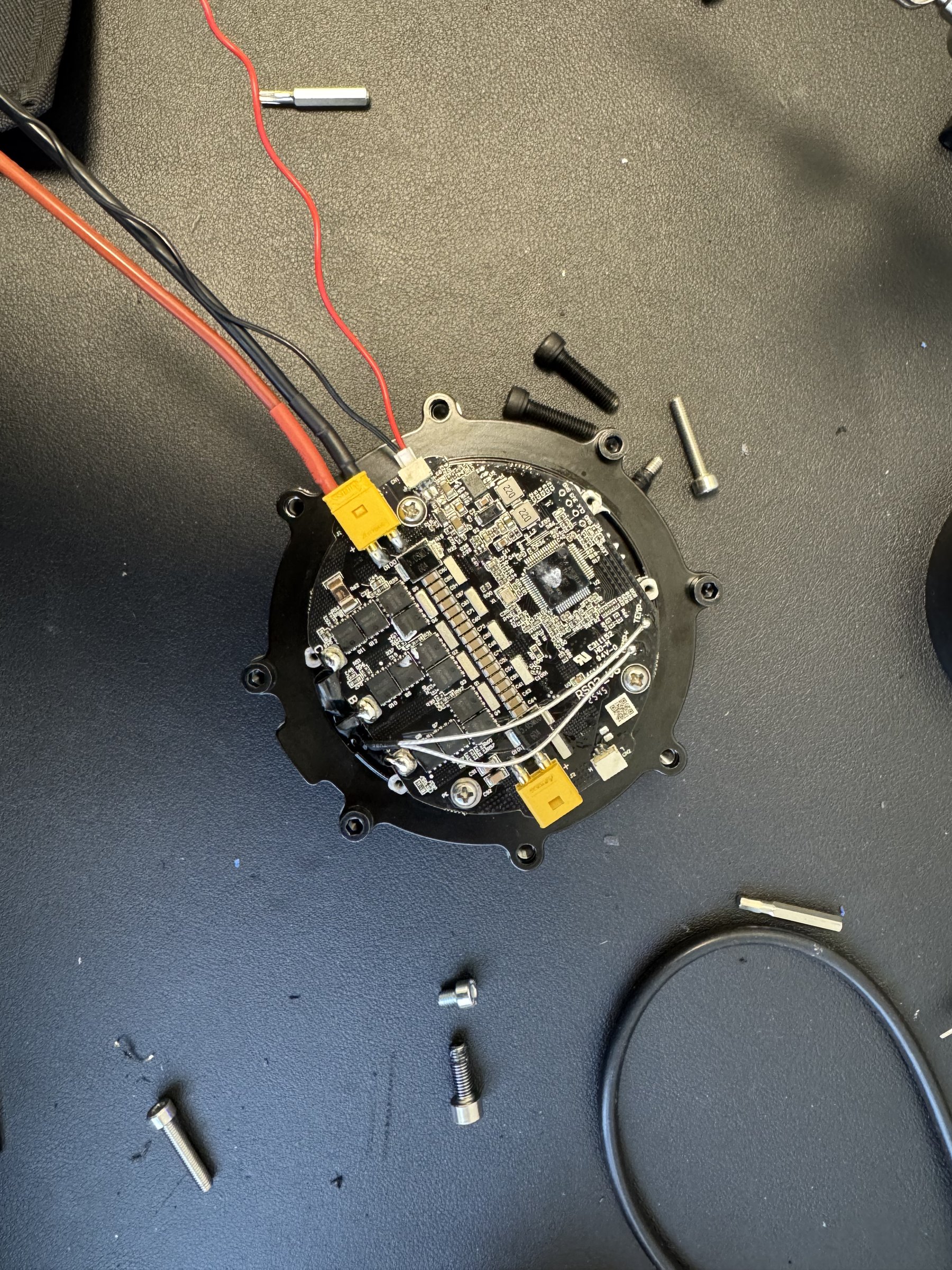
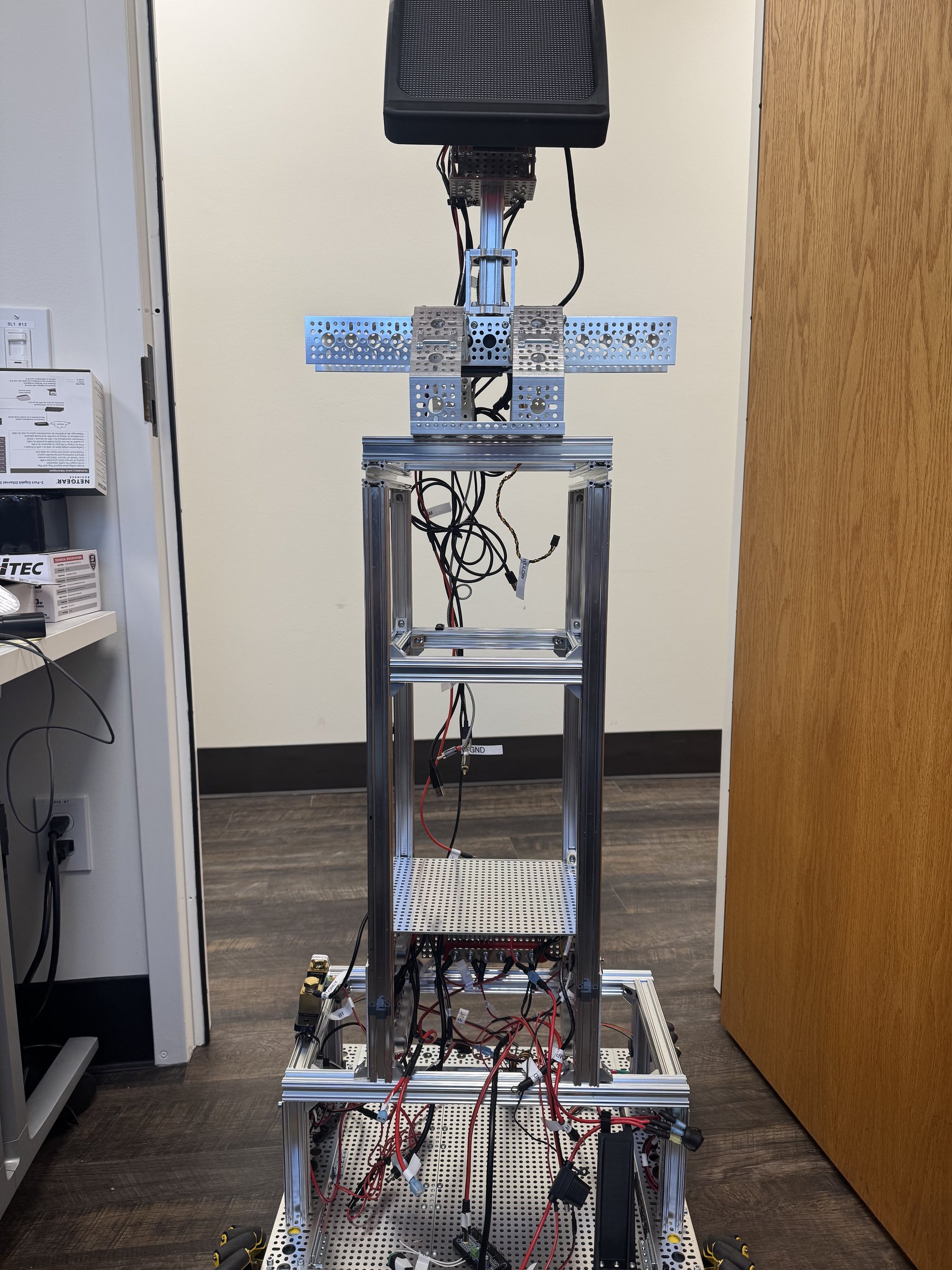
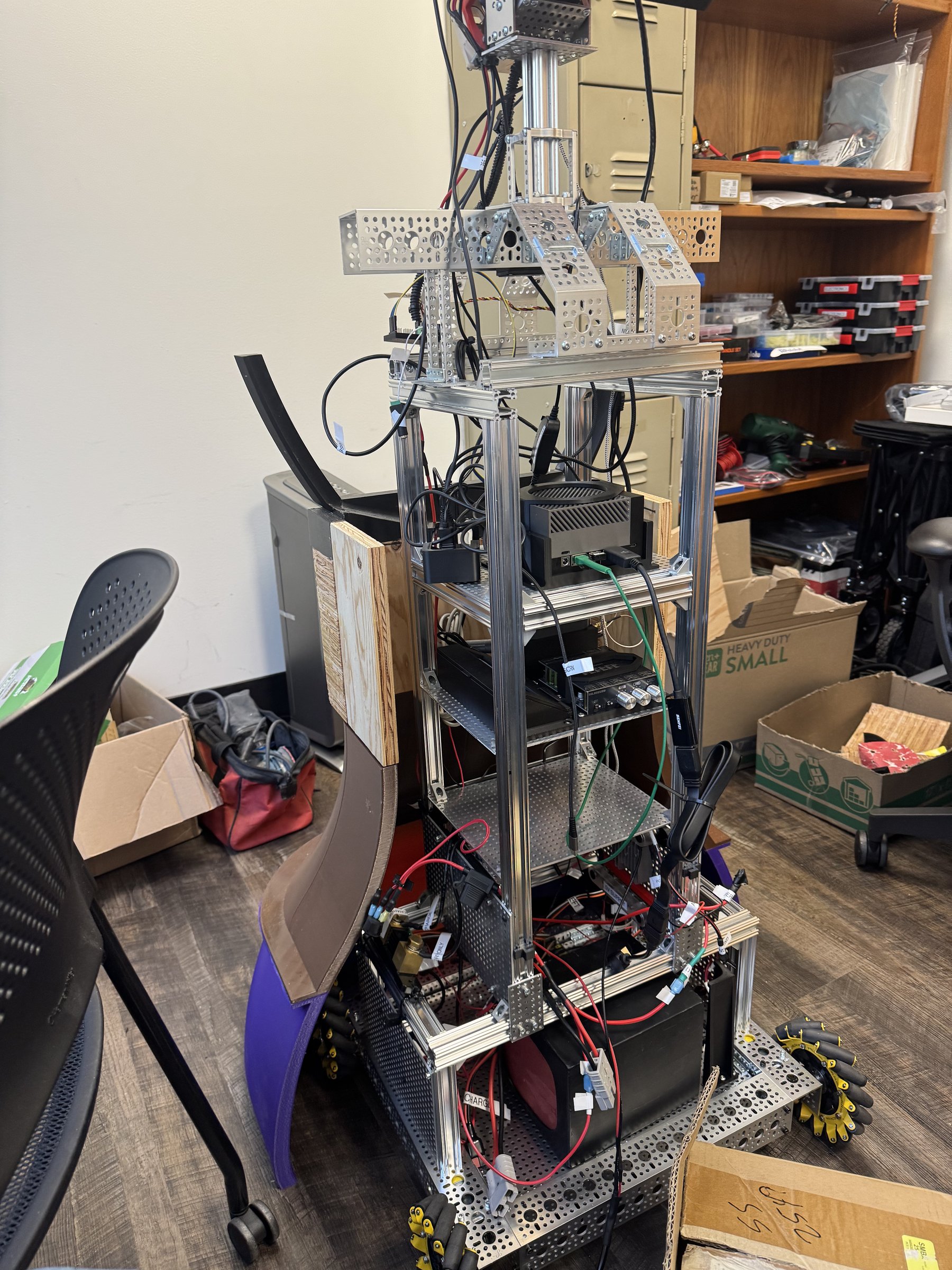
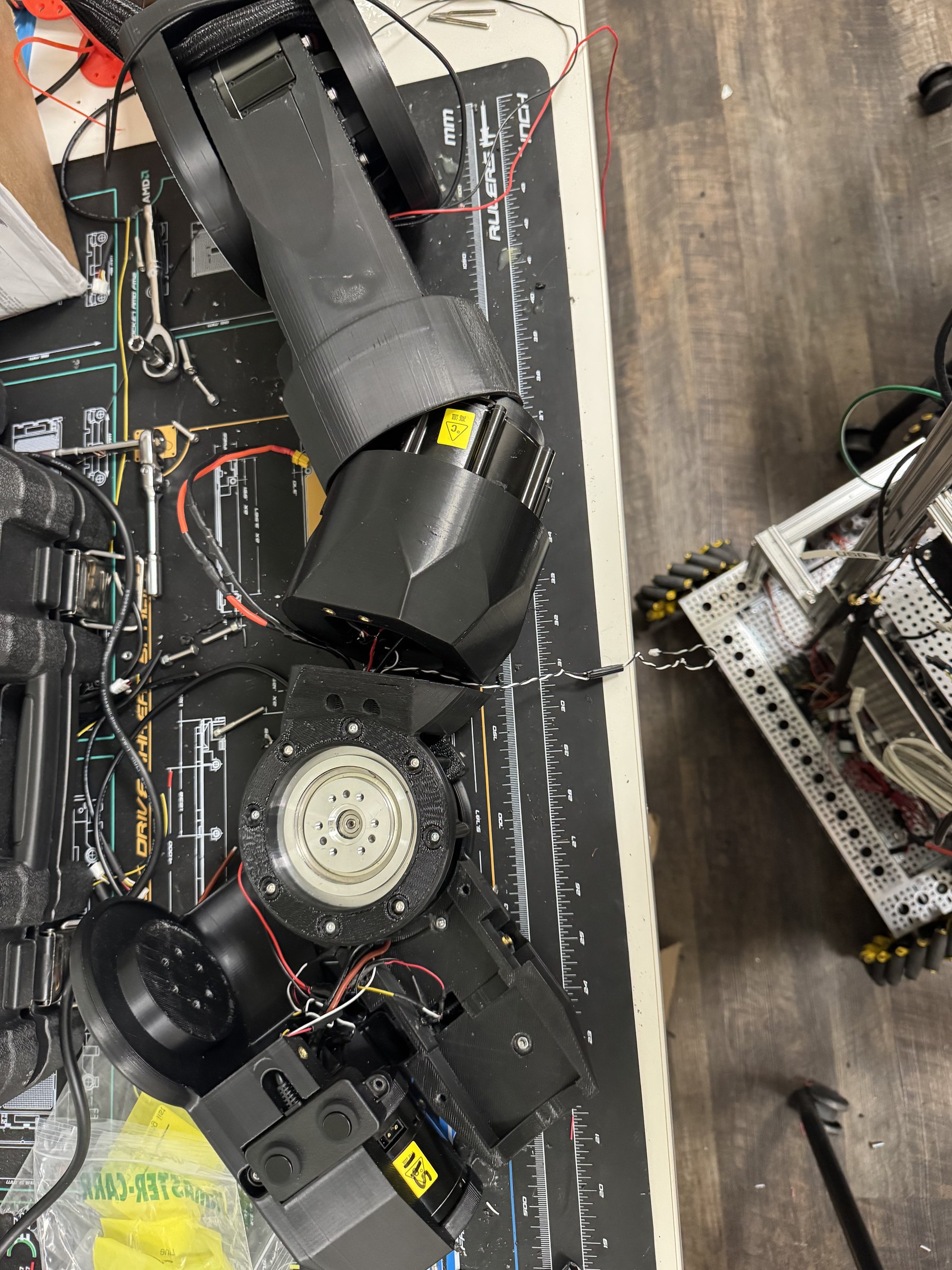
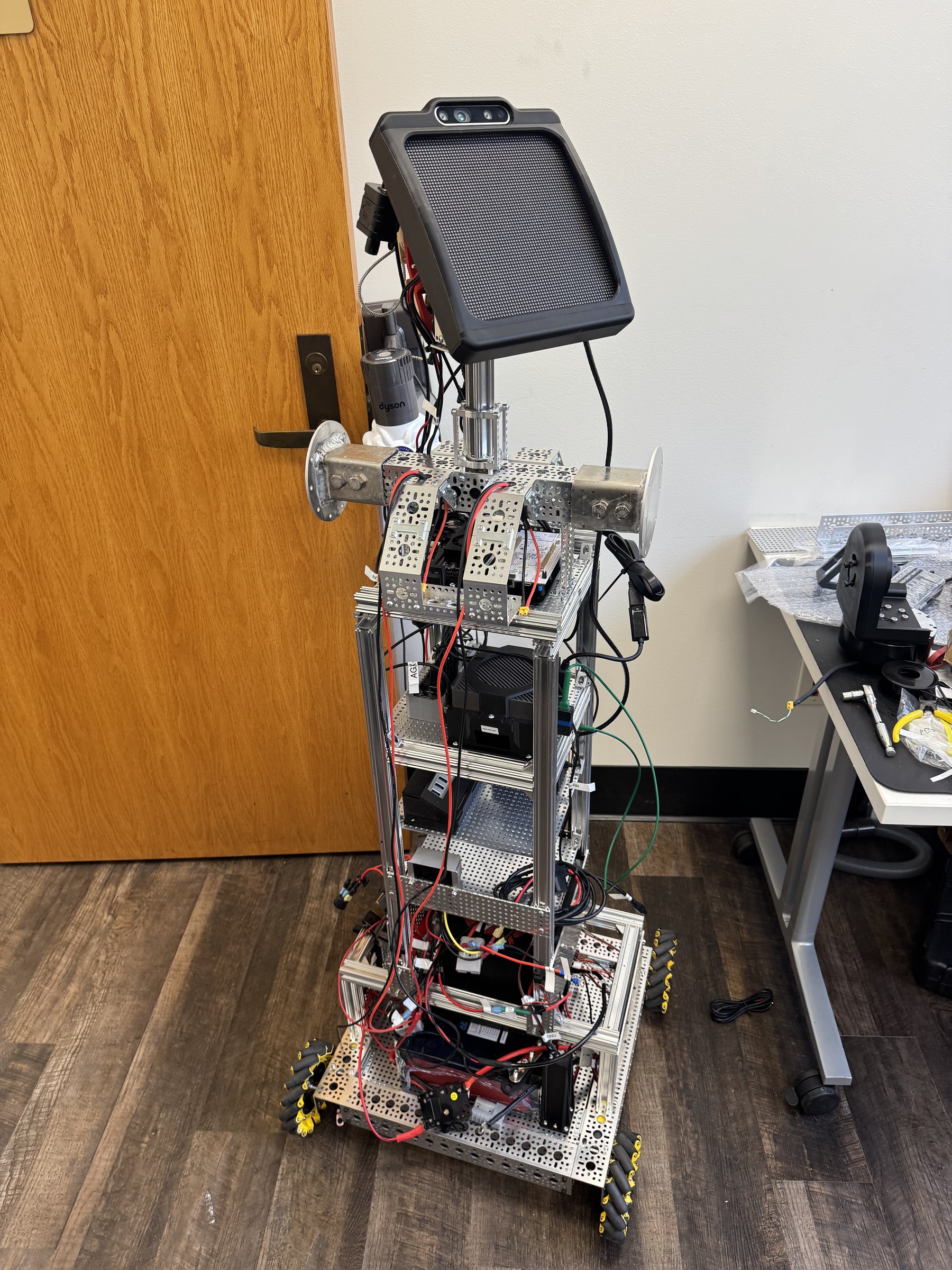
The robot features anatomically correct arm and hand kinematics with 5 degrees of freedom, driven by 10 quasi-direct drive planetary gear actuators daisy-chained together. Autonomous navigation runs on a NVIDIA Jetson Thor, supported by LiDAR and ultrasonic sensors (STM32-controlled) for real-time obstacle detection. The chassis panels are 3D printed in PLA, optimized for weight and structural performance.
Motion planning uses ROS2 and MoveIt 2, with Isaac Sim for simulation and kinematics validation. The robot runs entirely locally — no cloud computing — for a secure, private platform with an estimated 4–6 hour runtime under mild load. Current functionality includes crossing its arms, folding laundry, and reaching overhead. To verify full range of motion, Asher has a library of over 20 gestures used to communicate with people around him.